
|
モーションコントロール技術研究
|
|
実世界での触覚情報のリアルタイム伝送、ディジタル記録・編集、工学的再現といった要素技術開発から、手術支援システムや身体的支援ロボットなどへの技術応用に至るまで、幅広く研究活動を展開しています。力覚の伝達が可能な手術支援ロボット用プラットフォームやスケーリングを導入した力覚伝達システムの開発を行っています。
|
|
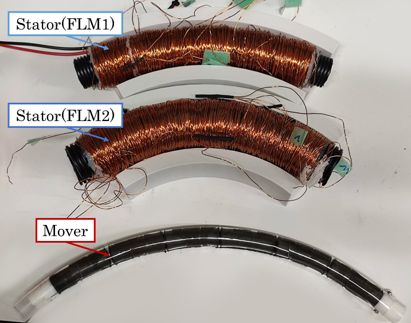
アクチュエーション技術研究
|
|
|
実世界ハプティクス技術をシステムとして実現するために、新たなアクチュエータの開発も行っています。様々な動作が可能なアクチュエータを開発することで、ハプティック技術を搭載した複雑な動作が可能なシステムの実現を目指しています。解析だけではなく自らの手でアクチュエータを製作し、実際に製作したアクチュエータの制御実験も行っています。
|
|
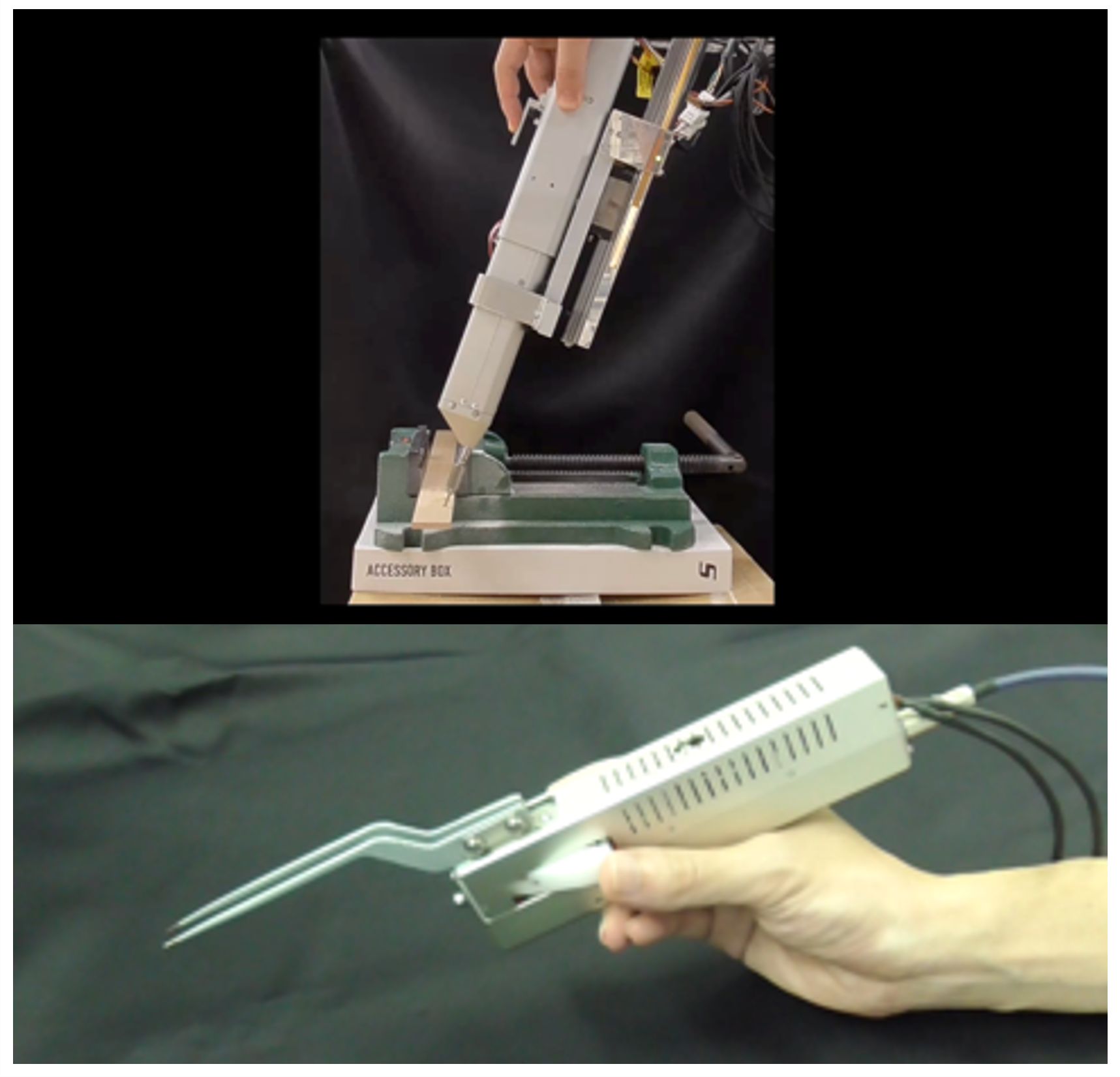
手術支援応用技術の開発
|
|
ハプティクス技術の医療応用として、手術支援システムの研究を行っています。バイラテラル制御技術を応用することにより触覚伝達を実現する手術支援プラットフォームの開発研究を行っています。
|
|
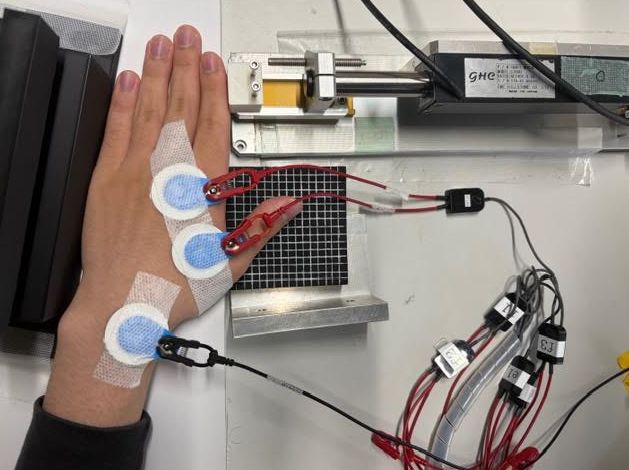
リハビリテーション支援応用技術の開発
|
|
|
ハプティクス技術の福祉応用として、リハビリテーション支援システムの開発を行っています。身体情報の定量化や視覚化に関する研究も行っており、ハプティクス技術を用いて麻痺を持つ患者の方の筋弛緩にかかる時間を測定し、リハビリを支援する研究を行っています。
|
|
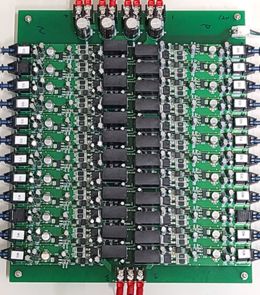
モーションコントロール・
パワーエレクトロニクス融合技術研究
|
|
モーションコントロール技術とパワーエレクトロニクス技術を融合し、高速・高精度なモーター制御システムの実現とその応用研究を行っています。FPGAによる高速な制御演算や、マルチレベルインバータによる電圧・電流波形の高品質化をモーションコントロールに応用し、制御性能の高度化を目指しています。
|